扫描二维码关注小程序
扫描二维码关注公众号
问律师
查技术
买专利
找专家
发布需求
一、技术简介
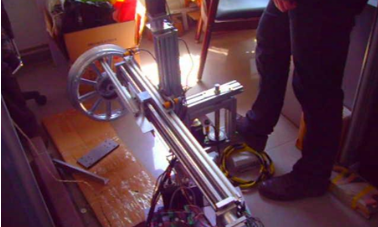
本技术产品适用于传统的劳动强度大的企业,对传统技术进行改造,具有高的重复定位精度和运转的稳定性。工业机器人具有4个自由度,负载5公斤以上。可根据客户实际需求进行功能的调整。搬运机器人样品见图1。
图1 搬运机器人样品
二、应用影响
可用于电动自行车铸造和压铸车轮的生产线,可以自动从模具型腔中取出铸件,放到指定位置,降低工人的劳动强度,提高生产率。
初期投资约500万元,场地需要120平米,人员5-8人。